Project Objective
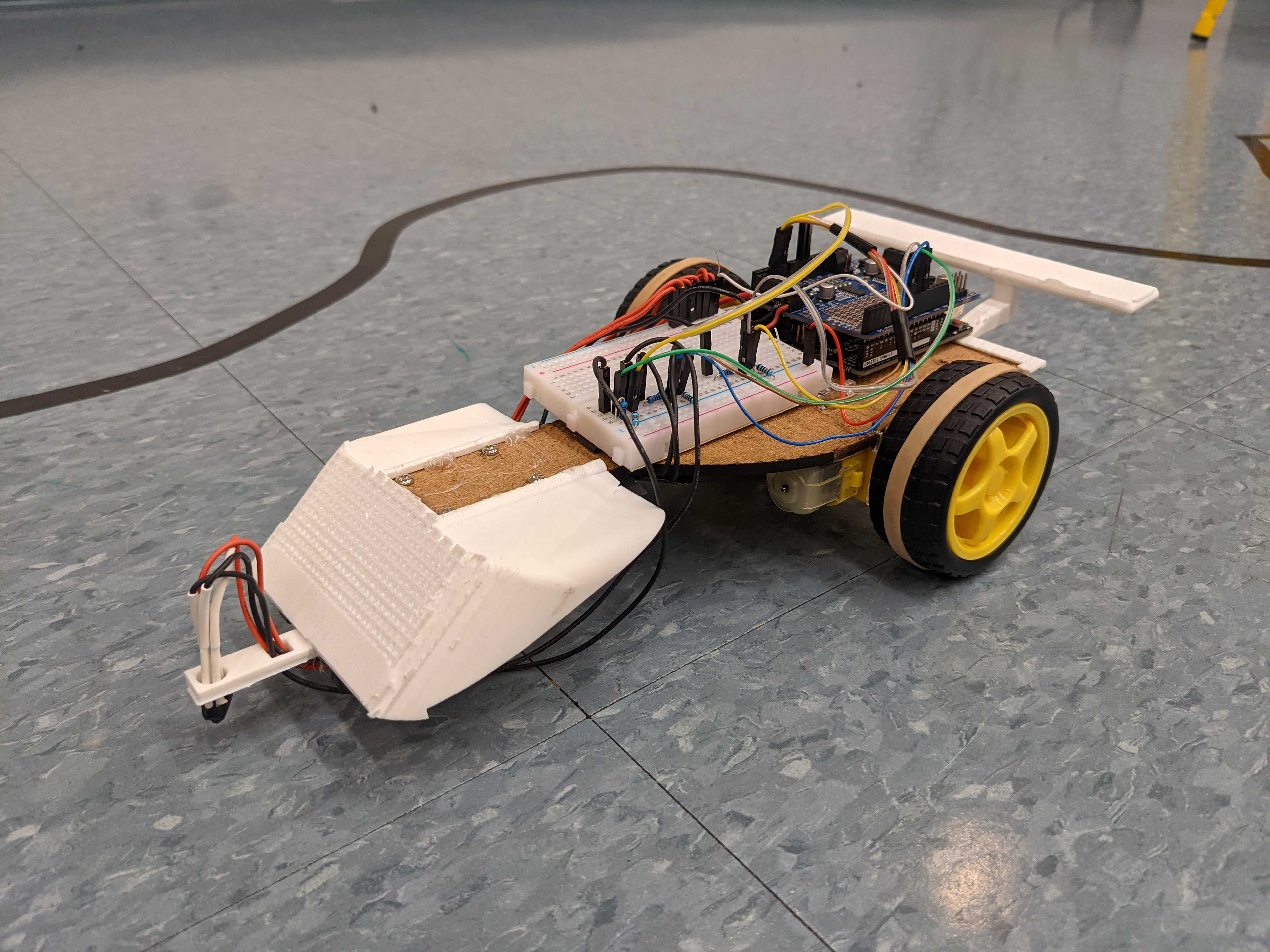
The purpose of this project was to design and fabricate a two-wheeled robot that is capable of following a winding physical path on the floor marked with black tape.
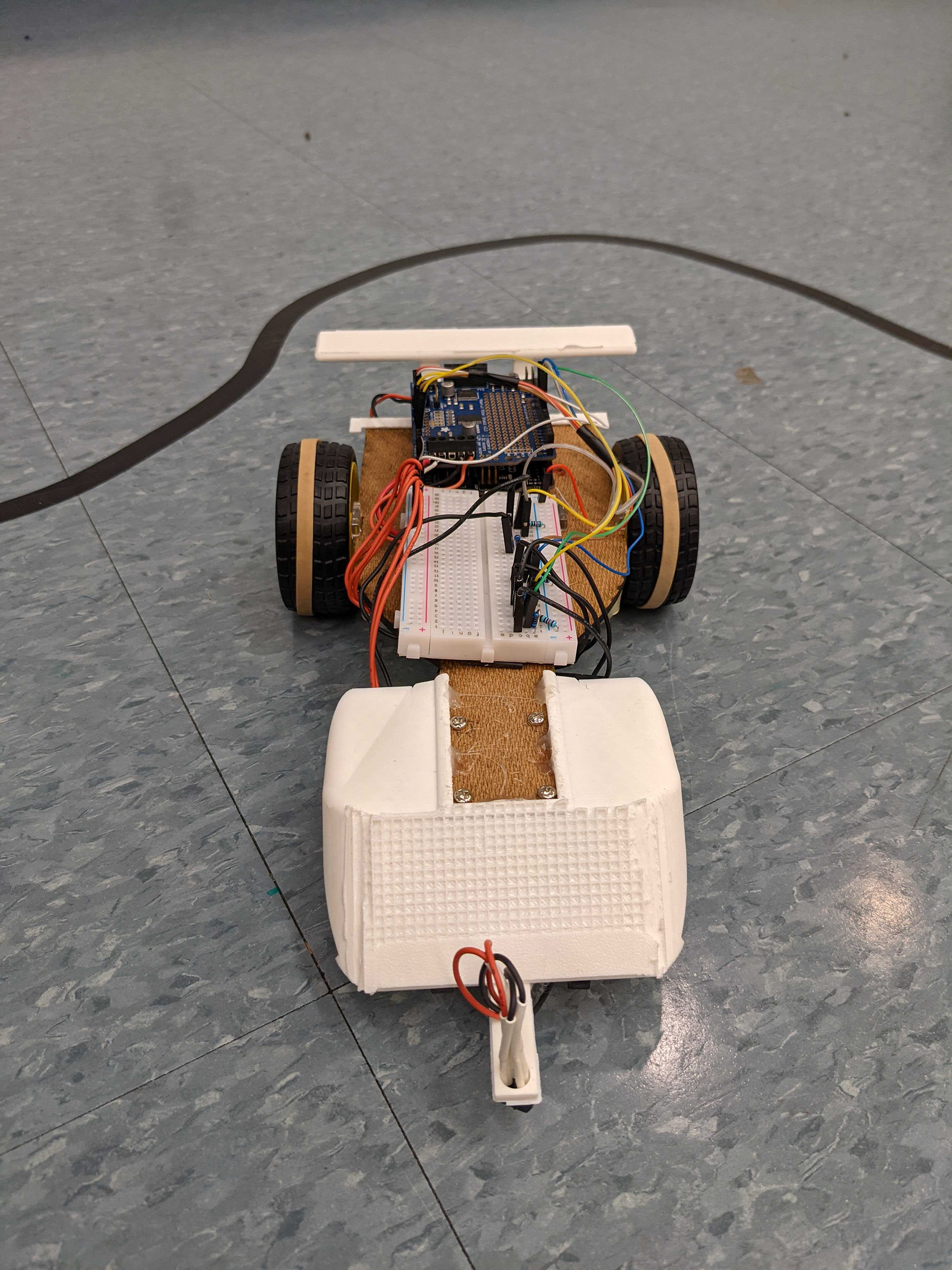
For the robot to follow the path dictated by the black tape, the IR reflectance sensor had to be used to differentiate between the floor and the tape. The IR sensor gives readings based on the waves being emitted and detected black. It therefore worked great with black tape and a well lit room as different colors reflect waves at different rates.
For the kinetic movement of the robot, the wheels were programmed to turn based on which one of the sensors went off the track. The wheels would turn until the sensors were back on the axis and the car was following the right path in small instances of time.
RESPONSIBILITIES

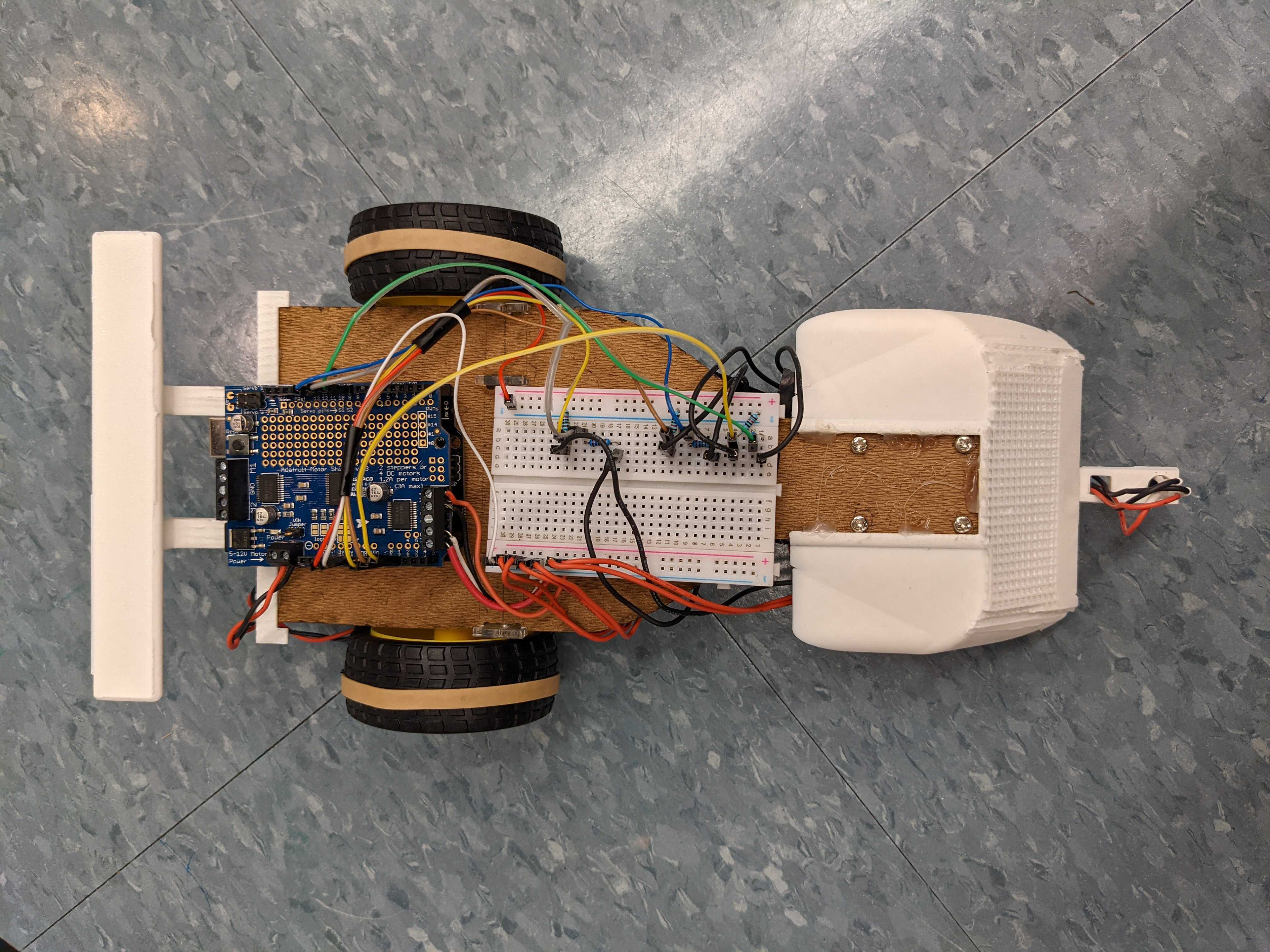
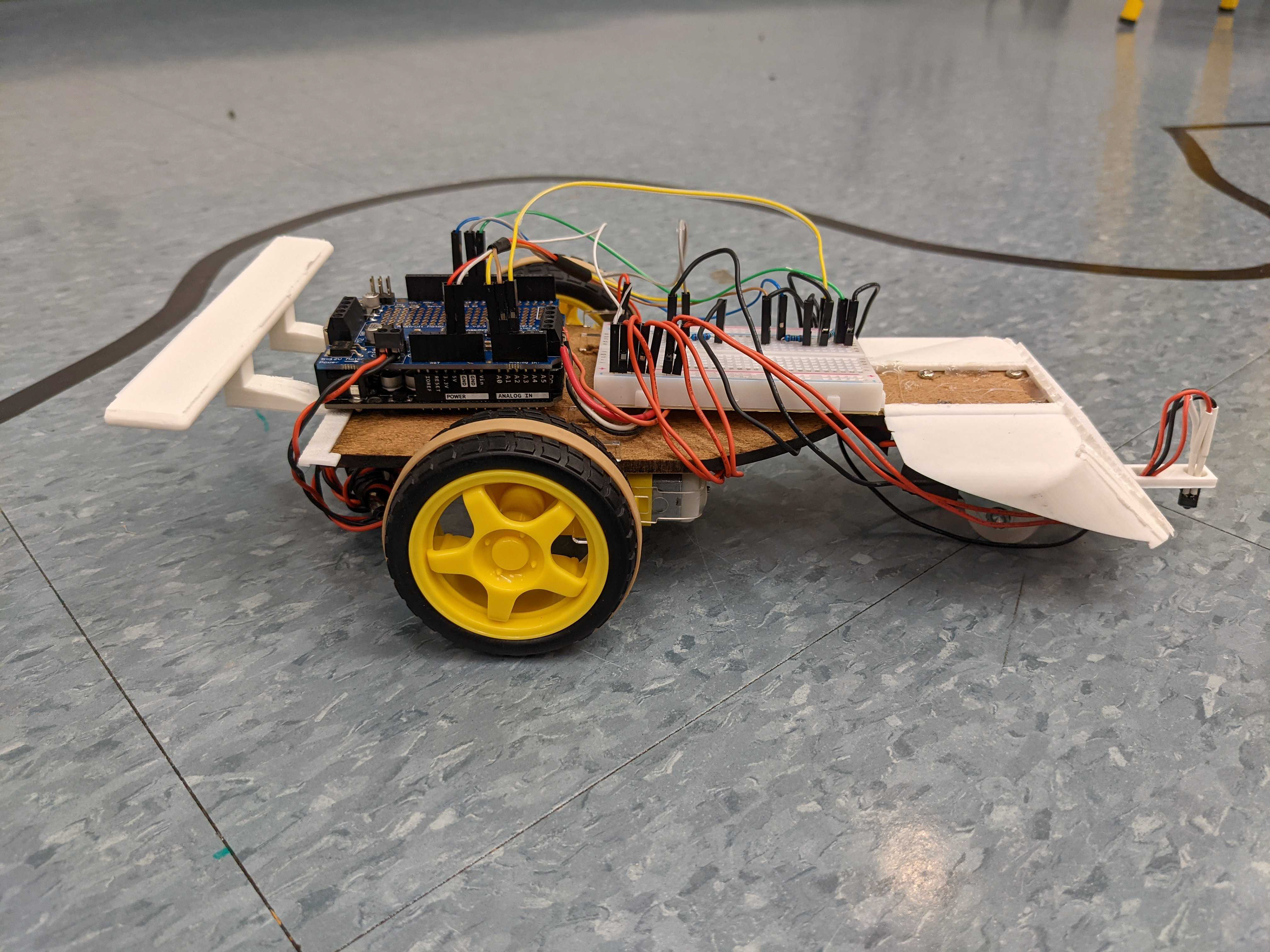
The main areas of work involved creating the bodywork and mounting for electronic components using SolidWorks CAD and FDM 3D printing. The inspiration for the bodywork came from the McLaren F1 vehicle (as seen in the front and rear wing).
The IR sensors necessary for line recognition were mounted right above the ground to limit the amount of irrelevant light emitting from external sources.
FINAL DELIVERABLE